I've been working on a new version of the software. Many parts are rewritten, allowing much more features in the future. I want to give out a beta test, as the changes are big and I have no resources to test them as extensively as I would like. But I think many of you would like to test and use the new features. So, if you feel adventurous, read on!
The most visible feature at this point is the new vision algorithm system, allowing unlimited number of algorithm types. Algorithm is collection of vision processing functions. Algorithms are "homing", "clear tape" etc, and you used to have only a few. Now you can have as many as you want. Functions are such as "invert", "threshold" etc. There are no new functions at this point.
There are also many changes not visible, but important for future development. Some items in the UI are also moved around. I haven't yet written the documentation, but if you have used the current software, most of it is more or less self-explanatory. If not, ask here!
New vision algorithm system
The new vision algorithm system needs a few words. The camera setup is on its own tab, and the vision algorithm UI looks like this:
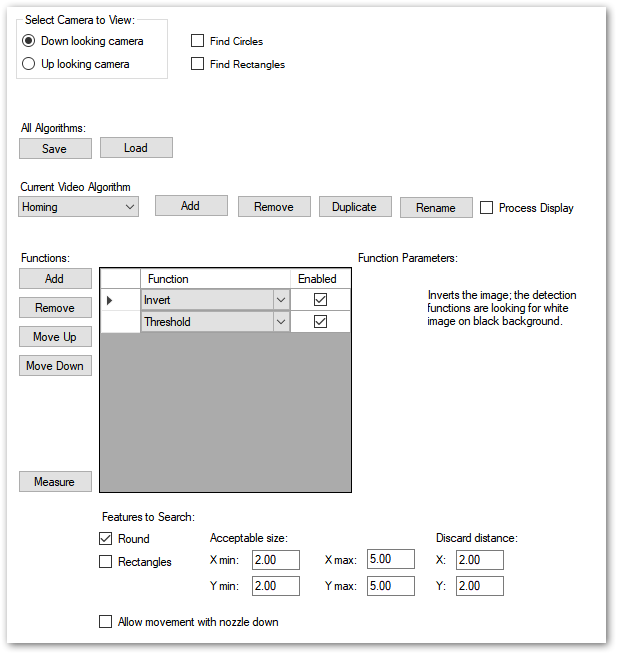
Items from top to bottom:
First, you can select which camera to view, and if video processing is on, which features to highlight.
You can save and load algorithms. Of course, the algorithms are also loaded on start and saved on exit.
On the next row, you select which algorithm you are setting up,. As indicated, you can add an algorithm, and you can remove, duplicate and rename the selected algorithm. you can also turn vision processing on.
On the next section, you set up the algorithm by adding and arranging functions. When you select a function, the right side gives an explanatory text and any parameters to tune (like threshold limit) will appear there.
The measure button does the measurement that you set up below and gives results in the log window.
And then the rewritten measurement section: I believe this will make the system much more reliable and versatile: You can take into an account round and rectangle features. (Components are coming.) You can set acceptable minimum and maximum sizes. For example, if you know you are searching for a 1mm fiducial, you can throw away all results smaller than 0.5mm (noise, vias) and bigger than 1.5mm (pads) to target the fiducial only. Also very useful when tuning nozzle tip recognition.The discard distance means that any results this far away from the initial position are thrown away, so you don't get a false result that might not be visible in the image with "show pixels" on but the camera sees it in the corner of its view.
Finally, you can allow movement with nozzle down. This seems out of position, but I found out that I needed this when calibrating nozzles.
How to get started
The software should co-exist with the current version; just copy the exe (link below) to the main LitePlacer directory. Still, I recommend you take a backup copy of the whole directory, just in case. You should also take screenshots of your current algorithm setups, as the new system doesn't read the old ones in. Also, the new software uses your old nozzle calibration data, but if you need to redo the calibration, you need to set up the processing again.
Feedback
I'm pretty sure there are issues and incompatibilities. Please, please report to me! If the new version doesn't play nicely with your current setup, please send me the full error message (with details clicked open) if any together with a zipped copy of your LitePlacer directory (which gives me a copy of your current setup, allowing me to reproduce the problem. Discussion in this thread is very welcome.
How to get
I'll give out the betas (I guess there will be more than one) and update the link here, as well as the thread title. In other words, when the beta testing proceeds, you can check your beta version date to the thread title. if there is a mismatch, the current beta is available here.
Download link to the current beta, dated 17.03.2020: https://www.liteplacer.com/Downloads/be ... 3-2020.exe
