Pixopax wrote:holder [...], consider making it shorter. Then we glue or press an acryl or polycarbonate tube on it, with M8 thread in it. Then we can detect the pressing of the nozzle optically.
At least with the Juki nozzles an available couplers / holders the design will not work - or I did not understand it correctly

Find below a CAD drawing of a Juki 502 nozzle - once in "normal" state and once with spring compressed:

- juki_502_default.png (10.35 KiB) Viewed 21927 times

- juki_502_compressed.png (7.35 KiB) Viewed 21927 times
As you can see, the inner shaft only protrudes slightly when spring is fully compressed. To measure this optically, the sensor would need to be in the holder itself.
Otherwise we could put some "extension" into the holder which moves upwards through the coupler and any hollow shaft attached to it so it can be detected furthert upwards. It must not obstruct the flow of air though and would either need to be heavy enough or also have a spring to move it back to neutral position when the nozzle does not touch anything.
If this does not work, we can still go back to Karl's approach of putting a small contact into the holder and detecting electrically when the nozzle touches a surface.
Pixopax wrote:Most people put these holders on hollow-shaft-steppers. I am not sure how much force it produces while changing, but the spring looks strong.
Since motor bearings are not made for this load, we should consider using your idea and press or screw the thing to a 8mm hollow shaft.
The couplers I am testing have a ball lock mechanism to hold the nozzles in place. Actually quite similar to the connectors used for compressed air on compressors or pneumatic tools. You have to push up the outer ring upwards to insert or release a nozzle.
Karl achieved this upward motion by using an angled plastic holder, which converts a sideways motion of the head in X or Y direction into a upwards momentum on the nozzle coupler's outer ring which slides onto the angled surface.
I agree that in this mechanism the shaft bearing will suffer sideways load. I am not sure though if this load is exessive as stepper bearings are often able to sustain relatively large loads.
However, we could also move the Z-axis to release / load the nozzle; we would need to "teach" LitePlacer software the right movements to load / unload a nozzle then.
Pixopax wrote:If we would do it really right, we should take small angular contact ball bearings, like the 30/8 2RS.
But there is no readymade holder for that bearing. Not a problem for me, but most people do not have the machines to make them.
So if malte does not currently have plans to make this holder, I will order one, and modify my system to use it, with a clear part for optical height detection, and angular bearings for the load.
I am currently testing four sample couplers. If you want to experiment, I could send you one of those. The ball lock is not perfect yet but I guess it would be good enough for a start and would certainly allow you to modify and experiment with different ways of mounting.
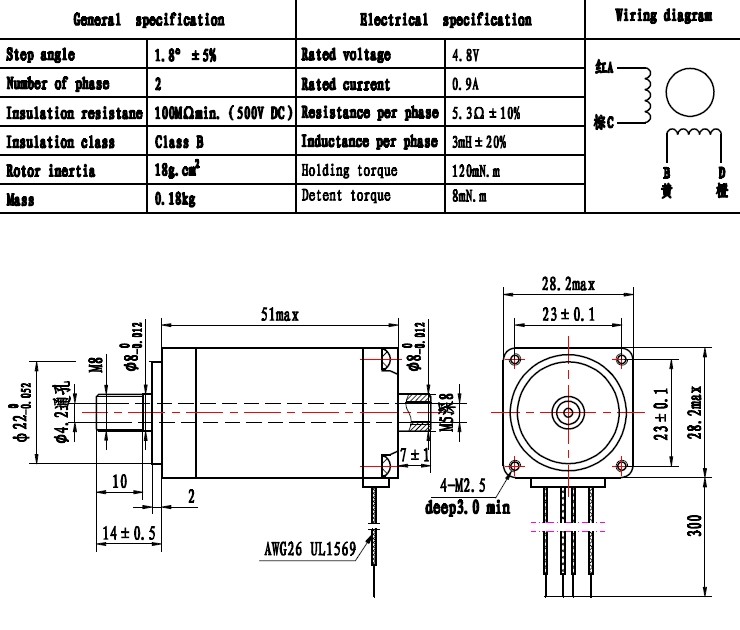
My plan is to mate the coupler to a NEMA11 stepper with M8 threaded shaft. I believe this stepper's bearings can take sufficient load to change a nozzle and produce enough torque to rotate the parts and overcome any friction from vacuum coupling.
Biggest problem so far - besides manufacturing tolerances in China - is the precision of the threads. The coupler and nozzle tip have some runout, they are not exactly centrical. I might go back to a cylindrical shaft and set screws which would allow to compensate this a bit.
Press on fit might be even better; but as I already mentioned the tolerances are a problem and press-on would require even better tolerances.
{kind=link}