Hi Reeza,
I tested the latest version on my machine.
First, I had to go to Windows Control Center, select "Remove / Uninstall Program" and uninstall what was just called "Installer" - I guess you did not label your application in the installer package. Until I did that, the new installer would not let me install as there was already "another version of this program installed".
After installing from your new package, I had to manually change file system privileges of the program folder to grant all users full access - otherwise the settings (SQLLite tables?) would not save.
Once these issues were out the way, I tested the auto calibration again. Unfortunately, I had no luck still. I made sure "Zoom factor" for downward cam was disabled, I also tried enabling this but it did not make any difference. However, it seems to me as if the result were influenced by the visual processing filters I set for "Homing". After removing the "Measure Zoom" filter I normally use, the calibration results were closer to the true size but still not accurate. Even worse, they are not deterministic. If I run the procedure multiple times in a row, it yields different results each time. Without the "Measure Zoom", the circle detection is not very accurate either.
Also, there seem to be issues in conjunction with homing cycle. After running the auto calibration, I can no longer home the machine as it does not recognize the circle of my homing mark any longer. If I enable circle detection and project the filter to display, the homing mark is detected and marked orange in the picture. But if I click "Measure button", the status window shows "no results". If I close and restart the application, this works again - homing and measure button.
I did not have the time yet to install Visual Studio on my LitePlacer PC (it is a different machine than my regular computer) and debug / step through your code to see what is really going on - but something is clearly going wrong here

The debug output in status window is not helping me much at this point, as the camera measurements are not displayed but just the machine movements. I think it is worthwhile adding these.
Maybe it has to do with camera resolution? My downward cam has 1920x1080 pixels.
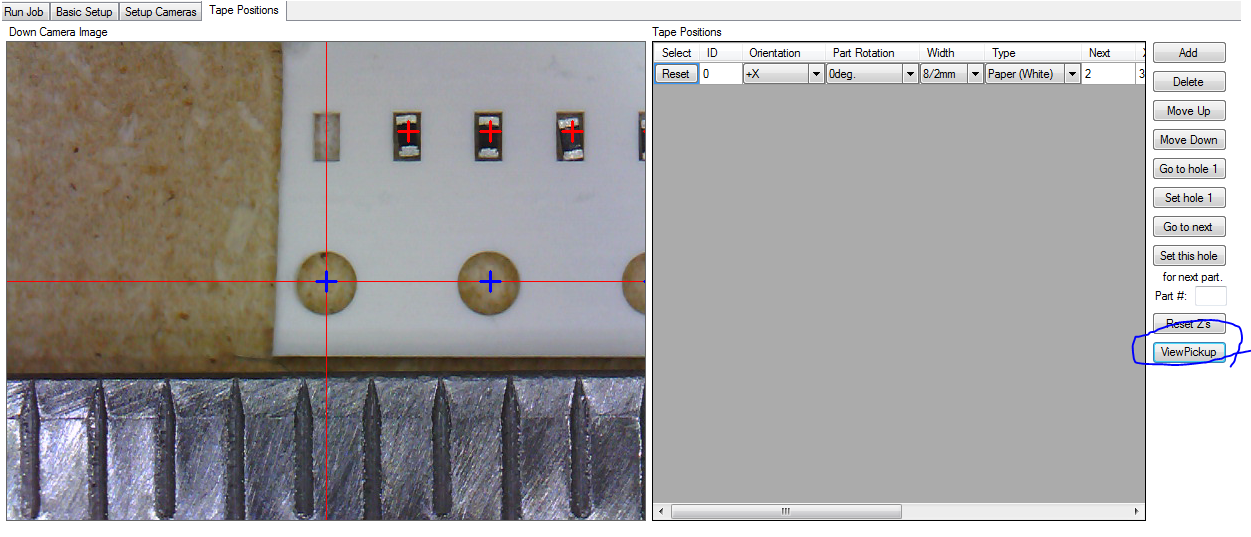
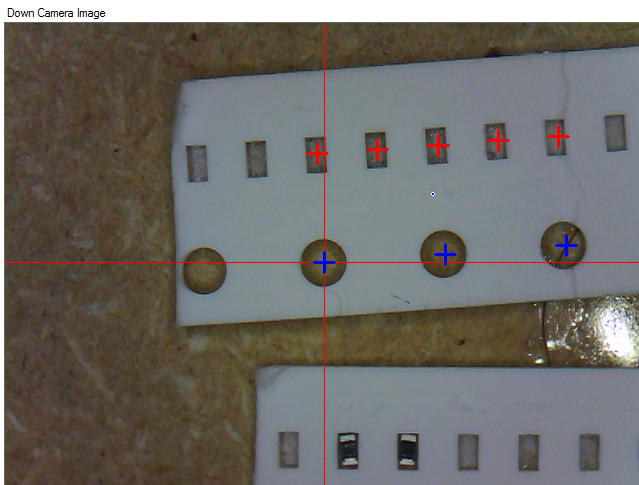
Last not least, I tested the tape functions. At first glance, these seem to work. I like the projection of the pickup locations - but as the pixel to mm setting was wrong due to my auto calibration attempts, they also appear in the wrong location... I need to manually measure again and retry tape functions, will do that tomorrow.